It’s never acceptable for someone to ogle your behind. That is, unless you’re riding through dark roads and trails. Then we’ll give everyone behind you a pass for not taking their eyes off your ride’s rear.
After all, nobody wants to get rear-ended. Those behind you have to know when you hit the brakes because of a sudden rock, ditch, or animal dashing out in front of you. That’s why good brake lights are so important for keeping everyone safe.
To make the rump of your motorcycle – or ATV or truck – more visible in the dark, you might want to consider installing auxiliary brake lights. The DENALI B6 LED Brake Light Pod is a good option for any vehicle.
We designed the B6 with the aim to provide as much light as we can in the smallest possible package. Each flush-mountable pod features a dual run-brake circuit that alternates between half and full intensity, based on whether or not your brakes are engaged.
Combining the B6 with the CANsmart™ Accessory Control offers even more functionality. You can easily enable programmable flash patterns to let those riding behind you know when you’re braking or accelerating.
But as it is with any light, even the most powerful light system is good for nothing if you can’t connect it to your vehicle’s wiring harness. The B6 comes with a wiring pigtail and three Posi-Tap Connectors, but we also have more connection options available.
The DENALI Y-Splitter for B6 Light Pods can connect and power two brake lights from only one harness connection. Its simple plug-and-play connectivity makes installation a cinch, and it also helps you make your wiring less of a mess.
Of course, some motorcycle OEMs have their proprietary plugs, so just any connector won’t work. Take, for example, the KTM Adventure and Super Adventure bikes. They’re amazing trail bikes, but their unique OEM harness connectors can make installing brake lights a headache.
That’s particularly troublesome for bikes that are by design supposed to go where there’s no street lighting. But don’t worry – enter the DENALI Wiring Adapter for KTM OEM harnesses.
Just like the Y-Splitter, the KTM Adapter installs seamlessly into the bike’s original harness without any splicing or modifications. Just plug it in and connect your B6 Light Pods without voiding your warranty.
A quick word of caution before you rush to install new brake lights – check your local laws regarding how many lights you can have on your bike. Most of the time you’re good as long as you have a brake light, but the laws can be a little bit weird about adding more of them.
When it comes to riding safety, you can’t afford to be bashful. We’ll help you make sure everyone’s eyes are glued to your ride’s trunk, no matter the conditions.
$0. 00 00 | ||||
| Shipping | ||||
| Total | ||||
 BarthélemySt. HelenaSt. Kitts & NevisSt. LuciaSt. MartinSt. Pierre & MiquelonSt. Vincent & GrenadinesSudanSurinameSvalbard & Jan MayenSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTimor-LesteTogoTokelauTongaTrinidad & TobagoTunisiaTurkeyTurkmenistanTurks & Caicos IslandsTuvaluU.S. Outlying IslandsUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUruguayUzbekistanVanuatuVatican CityVenezuelaVietnamWallis & FutunaWestern SaharaYemenZambiaZimbabwe
BarthélemySt. HelenaSt. Kitts & NevisSt. LuciaSt. MartinSt. Pierre & MiquelonSt. Vincent & GrenadinesSudanSurinameSvalbard & Jan MayenSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTimor-LesteTogoTokelauTongaTrinidad & TobagoTunisiaTurkeyTurkmenistanTurks & Caicos IslandsTuvaluU.S. Outlying IslandsUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUruguayUzbekistanVanuatuVatican CityVenezuelaVietnamWallis & FutunaWestern SaharaYemenZambiaZimbabweAlabamaAlaskaAmerican SamoaArizonaArkansasCaliforniaColoradoConnecticutDelawareDistrict of ColumbiaFederated States of MicronesiaFloridaGeorgiaGuamHawaiiIdahoIllinoisIndianaIowaKansasKentuckyLouisianaMaineMarshall IslandsMarylandMassachusettsMichiganMinnesotaMississippiMissouriMontanaNebraskaNevadaNew HampshireNew JerseyNew MexicoNew YorkNorth CarolinaNorth DakotaNorthern Mariana IslandsOhioOklahomaOregonPalauPennsylvaniaPuerto RicoRhode IslandSouth CarolinaSouth DakotaTennesseeTexasUtahVermontVirgin IslandsVirginiaWashingtonWest VirginiaWisconsinWyomingArmed Forces AmericasArmed Forces EuropeArmed Forces Pacific
Nothing in this world lasts forever, but some Chinese products simply surprise with their “durability”. I will talk about my experience of upgrading a children's ATV.
I will talk about my experience of upgrading a children's ATV.
What we have: a KL-789 children's ATV with minor malfunctions, some free time and a desire to stick an arduino lying around there.
What we want: something that lasts longer than one month, preferably with improved performance.
The ATV has two 12V RS550 commutator motors, with a shaft speed of 19300 rpm at idle, connected to the rear wheels with a diameter of ~30 cm through gearboxes with a gear ratio of ~131. Simple math says that the maximum speed of this vehicle should be 19300/131/60 * 3.14 * 0.3 = 2.31 m/s or 8.3 km/h. In practice, he travels at about 7 km/h. During the selection of new components, I struggled with the desire to make the maximum speed, and the fear that this would be too dangerous a transport for children. Therefore, it was decided that he should go 1.5-2 times faster. In addition to engines, I was not satisfied with it:
 First speed - pedal, motors are connected in series. The second speed is a handle on the steering wheel, the motors are connected in parallel. The brake is automatic when the pedal is released, the motor windings are closed. This scheme leads to a too abrupt start, a complete absence of free rolling, the same sharp brake, all this leads to large current loads (the pedal button melted during the month of operation), and mechanical stress on the gearboxes and wheels, not to mention the banal discomfort ride
First speed - pedal, motors are connected in series. The second speed is a handle on the steering wheel, the motors are connected in parallel. The brake is automatic when the pedal is released, the motor windings are closed. This scheme leads to a too abrupt start, a complete absence of free rolling, the same sharp brake, all this leads to large current loads (the pedal button melted during the month of operation), and mechanical stress on the gearboxes and wheels, not to mention the banal discomfort ride Those. I was not satisfied with absolutely all the electrics. After some thought, it was decided to use:
 0, as the controller of all this
0, as the controller of all this In addition, to reduce the rumble of plastic wheels and improve the smoothness of the ride, 4 tires 12.5 "for baby strollers were bought, after which they were slightly modified with a clerical knife, and then they were pulled onto the wheels of an ATV and fixed with self-tapping screws:
When everything arrived, a prototype was assembled on its knees, it turned out that the engines even without load heat up to 70 degrees in 3-5 minutes of operation, I had to buy two coolers for them, and the regulators, on the contrary, even with the fans turned off, do not heat up ( looking ahead, on an ATV under load, they also do not heat up). Because we have two motors on two different sides, it was necessary to solve one more problem - sensory motors spin only in one direction. Initially, it was planned to disassemble one motor and turn the sensor 180 degrees in it ... but reality has shown that this cannot be done with little bloodshed. Moreover, during experiments with the sensor and timings, one of the regulators partially burned out, as a result, I abandoned the sensor and connected them as ordinary BCs. The sensor itself consists of three Hall sensors that monitor the position of the rotor, and a temperature sensor. It was decided not to leave all this economy, but to connect it to the MK and use it as an engine temperature sensor, an engine speed sensor, and later, knowing the gear ratio, as a speed sensor.
Initially, it was planned to disassemble one motor and turn the sensor 180 degrees in it ... but reality has shown that this cannot be done with little bloodshed. Moreover, during experiments with the sensor and timings, one of the regulators partially burned out, as a result, I abandoned the sensor and connected them as ordinary BCs. The sensor itself consists of three Hall sensors that monitor the position of the rotor, and a temperature sensor. It was decided not to leave all this economy, but to connect it to the MK and use it as an engine temperature sensor, an engine speed sensor, and later, knowing the gear ratio, as a speed sensor.
The pwmservo library was somewhat puzzling, it is designed to control servos (regulators in my case) through hardware PWM, with an accuracy of 1 degree, only 180 states, and the “forward” direction is only half the range, i.e. 90 states. It seemed to me that this was not enough, I had to edit the library to the detriment of the cross-platform arduin (it turned out only for controllers with 16 MHz), the result is 1000 states in each direction (the unit is equal to 0. 5 μs of the PWM duration, PWM from 1 to 2 ms).
5 μs of the PWM duration, PWM from 1 to 2 ms).
After the work "on the knee" was more or less debugged, all this equipment was installed on the ATV:
Photo
Engine + gearbox:
Inside a small creative mess of wires (just threw all the wires inside, I wanted to test faster, later brought to human form):
Because the power turned out to be more than 500 W, it was necessary to limit the rate of increase of the gas, if you sharply turn the gas to the maximum from a place, the power will increase smoothly, and will reach its maximum in about 3 seconds. I am sure that without this there would be an effect of instant overturning.
In general, here is a telemetry video recording from the phone screen, everything is visible there, only due to a slightly glitched speed sensor in the left engine (left green column), the speed data is slightly underestimated, the maximum speed achieved on fresh batteries is 18 km/h
Values of the columns: blue - engine temperature in degrees, green - engine speed in rpm, orange - power supplied to the engines in conditional numbers from 0 to 1000, gray - throttle position.
And this is how it goes:
I wasn’t dragged away… it’s slipping, but I rode the ATV itself, and judging by the telemetry, it absolutely doesn’t care who is on top
On the first video, a crunch is heard at the start. On the first evening, the gearboxes completely failed. The problem turned out to be that the gearboxes consist of nylon gears rotating on a 9 mm steel axle without bearings, so the friction force of the gears turned out to be so large that in one gearbox the middle just melted out in the gears and the alignment was lost. In another gearbox, the gear was welded to the axle, and the axle began to rotate in the housing and melt it, as a result of which the gear also lost alignment.
To solve this problem, you need:
The new axles are 5mm, so I had to print bushings on a 3D printer with an outer diameter of 9 mm (like the old axles), and an inner diameter of 5 mm, in order to be able to install the new axles in the old gearbox housing, 11 mm holes were drilled in the gears with a depth of 5 mm with both sides (bearing seats).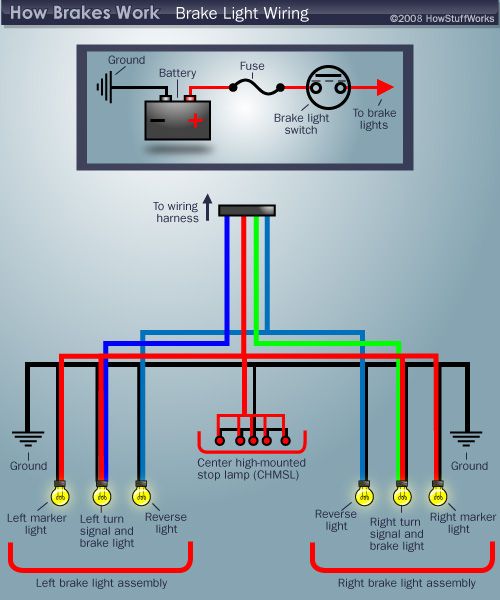 The gears are now mounted on bearings, and also generously lubricated with lithol, and for more than six months everything has been running fine in any conditions:
The gears are now mounted on bearings, and also generously lubricated with lithol, and for more than six months everything has been running fine in any conditions:
But I don’t stop there, the next step is custom gearbox gears in order to increase the speed to 25-30 km / h.
Kids learn very quickly and are already great at entering a 90-degree turn with a little braking and then a sharp throttle out of the turn.
Sketch, modified pwmservo library, pinount can be downloaded here, all this is in draft form, there is a lot of unfinished and debug code in the code, for which I apologize in advance.
08/15/2013
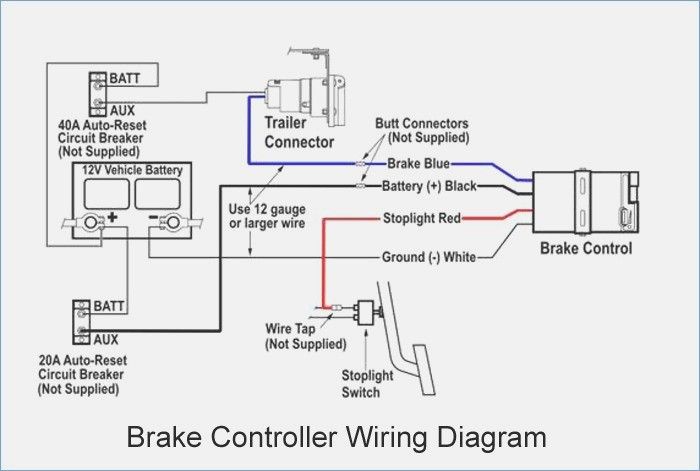
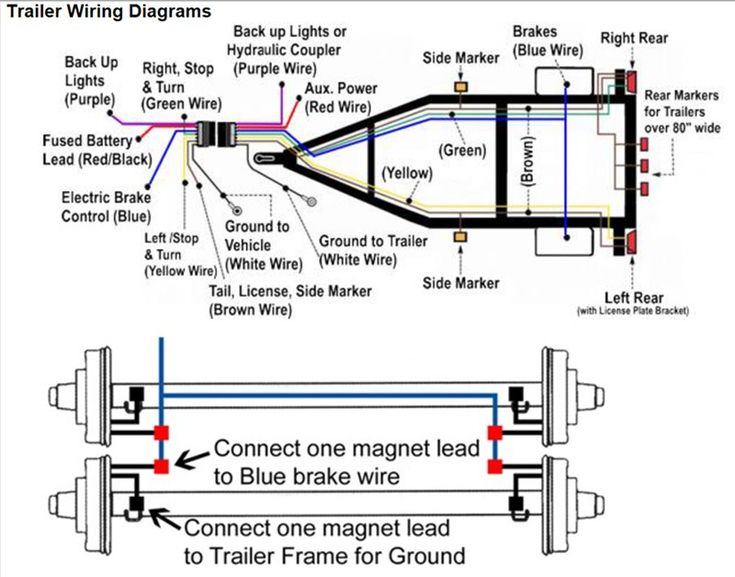
The article shows the standard electrical pinout. Those. if you installed a towbar in a specialized service, and you can safely buy a new trailer for your car. If you installed the towbar yourself, then we hope this article will be useful to you.
If you need a trailer wiring diagram, towbar socket pinout, you can use the information below.
| Contact no. | Code | Wire color MZSA | Wire color GOST 9200-76 page 10 (11) | On some Ukrainian trailers | Signal | Wire size |
| 1 | L | Yellow | Yellow | Green | Left turn signal | 1.5 mm 2 |
| 2 | 54G | Blue | Blue | Red-white | Option, fog lamp is removed in Russia | 1.5 mm 2 |
| 3 | 31 | White | White | Black | Earth (-) | 2. |
| 4 | R | Green | Green | Yellow | Right turn signal | 1.5 mm 2 |
| 5 | 58R | (No wire) | Brown | Rose red | Right marker and number 9 illumination0003 (sometimes reverse) | 1.5 mm 2 |
| 6 | 54 | Brown | Red | Blue white | Stop lights | 1.5 mm 2 |
| 7 | 58L | Black | Black | Blue-black | Left marker | 1.  |
 5 mm 2
5 mm 2